
As I move forward with creating my retro-futuristic robot head, I have a clear vision of what I want the project to achieve, both functionally and aesthetically. The goals I’ve set will guide the process and give me a benchmark to measure success.
Goals:
-
Aesthetic Consistency: The robot head must embody the spirit of retro-futurism, particularly the sleek, optimistic designs of the 1950s and 60s. I envision a piece that not only functions as a can crusher but also serves as an eye-catching wall art piece. The robot should look like something from an old science fiction vision of the future. I want it to be simple while having enough detail to not look bland, along with metallic finishes and geometric facial features.
-
Functionality: Beyond the visual appeal, the can-crushing mechanism must work reliably and smoothly. The goal is for the head to crush aluminum cans without sacrificing its aesthetic integrity. I was aiming for a mechanical, lever-based system to ensure longevity and reduce the complexity of self-made electronics, however, I decided to simplify this further by purchasing an electric can crusher that achieves its purpose in a relatively slim form factor. The crushing mechanism will be hidden behind the robot’s face, ensuring that it serves its purpose without disrupting the overall design.
-
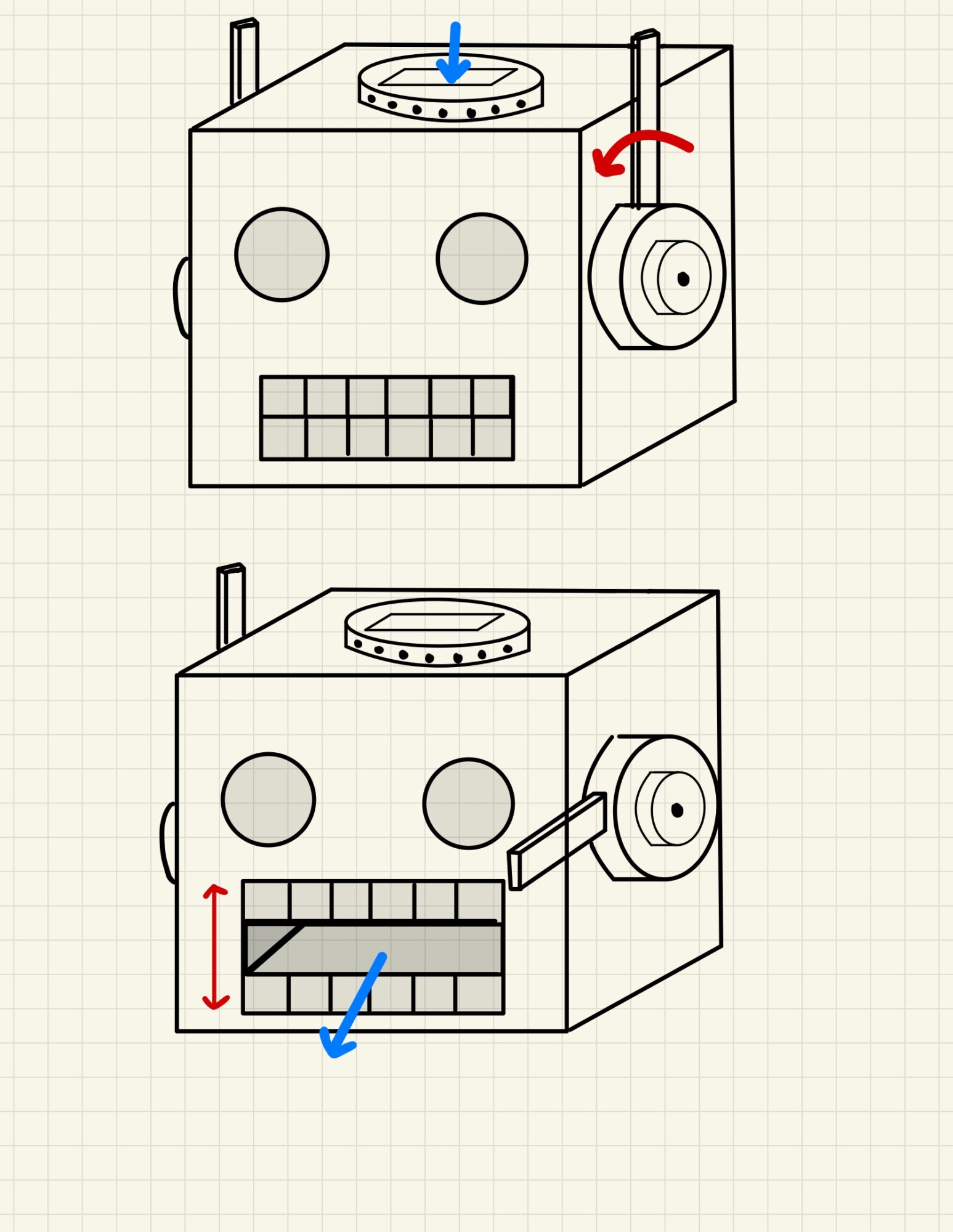
Interactive Experience: One key aspect of the design is interactivity. I want users to be able to load cans into the robot and watch it crush them. The mouth will open and close, possibly actuated manually, but hopefully I can do it automatically. The physical interaction should make the piece functional yet whimsical.
-
Durability and Reliability: Success for me will be measured by how well the piece stands the test of time. I need to ensure that the crushing mechanism operates without failure and that the robot head maintains its integrity despite regular use. The electric can crusher should aid in this but mounting it should be durable.
-
Space Efficiency and Practicality: Since this will be wall-mounted, it must be compact enough to fit in a variety of spaces, since I will be moving soon. I want the robot to take up minimal room while still making a strong visual impact. The project will succeed if it can be easily integrated into a home or office setting, functioning as both an art piece and a tool.
Constraints:
-
Time: Given that this is a multi-step project involving design, fabrication, and testing, time is one of my biggest constraints. With a timeline of five weeks, there’s not a whole lot of room for error. I’ll need to be efficient, but also flexible in case certain stages take longer than expected.
-
Money: Although I’m using some pre-existing components, like the can crusher, there are still costs associated with materials for the outer shell, mounting, and possibly electronics if I choose to add lights or sound. I’ve allocated a budget for the project, but I’m aware that unanticipated costs, such as shipping fees for materials or potential upgrades to the mechanical system, could stretch my financial resources.
-
Skills: While I have a basic understanding of CAD design and mechanical systems, this project may require me to learn Blender. My experience with this is extremely limited, so I anticipate spending some time learning as I go.
-
Materials Integration: Because I am planning to 3D print the outer shell, I will need to split it up into several pieces, as the overall footprint is too large to print in one go. Seamlessly incorporating these different pieces will likely be difficult, and I will likely have to rely on detailed parts to accommodate.
-
Functionality and Aesthetics: Another challenge I face is the insertion of cans into the robot, not being too visually overbearing. I might have to rely on a hinging mechanism to hide the input, but otherwise I plan on using a slot which I hope fits the aesthetic well enough.
1 Comment. Leave new
Hi Garrett,
This is a super cool idea, I can’t wait to see the finished product! You mentioned this is a wall art piece, will you be planning to mount it to a wall?