

Himachal-Inspired Peacock Sculpture: Specifications & Constraints
Project Update
Since my last post, the ideas and plans for my final project have grown and changed. I am still working towards a Himachal-inspired aesthetic, which will incorporate lots of vibrant colors and textures. And I am still planning to make a peacock sculpture, probably one that is quite large, suitable for an art gallery or a centerpiece in a large room.
One major change is the idea to make the sculpture kinetic. For this goal, my plan is to use an Arduino MC with the project to make the tail feathers rotate when someone stands near to it. The tail feathers will be mounted on white dowel rods, which will in turn be mounted onto small 3d printed gears. The gears will be turned back and forth by a stepper motor, which I intend to use with a light sensor to detect proximity of the viewer.
Top Five Specifications
The first goal for my project is to actually finish it. I crochet a lot, but I am notorious for leaving projects partially completed. So this will be my primary method for measuring success in this project.
I have a very specific Hindu-inspired aesthetic in mind, and so my next primary goal is to achieve a warm and vibrant color palette reminiscent of these 2 handicraft pieces which I snapped pictures of in the state of Himachal Pradesh, India. If I can achieve a very bright final piece, while still using colors tastefully and without being an exact replica of a rainbow, then I will feel that I have succeeded.


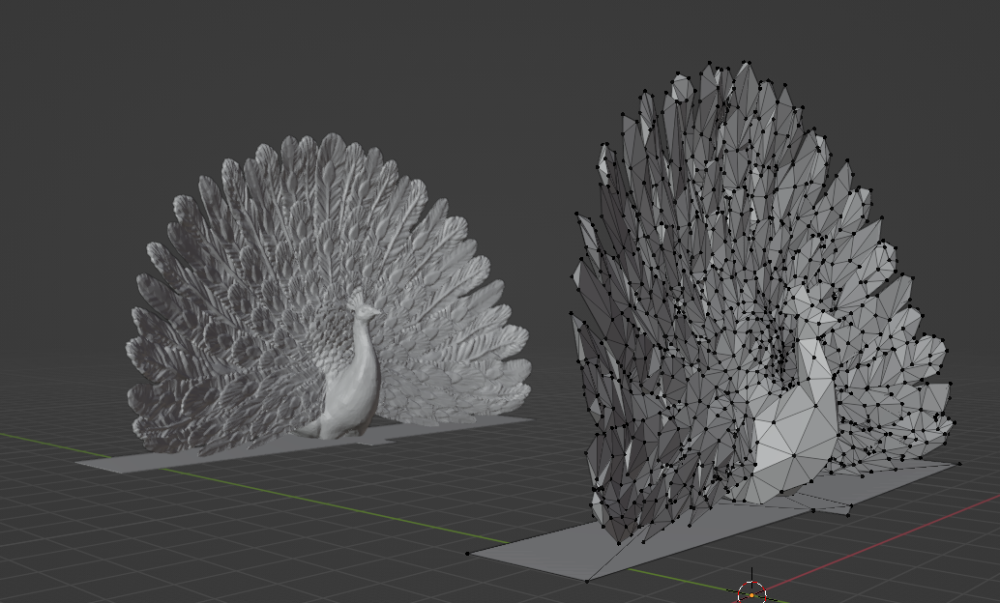
The final piece will be made entirely of triangles, which I hope will give it a geometric yet satisfying look. I plan to leave facial features and other animal details out of the design, so that the viewer is not focusing on the eyes of the peacock for example, but rather looking at the entirety of the piece at once.
I am prioritizing the aesthetic qualities of the project over the kinetic aspect. However, making the peacock move will be a significantly better final design. If I do have time to work on making the sculpture kinetic, then I have a goal to make the sculpture’s mounting and electrical components as unobtrusive as possible.
It would make me feel successful in this project if viewers immediately notice the intricacy of the crochet work. I am intentionally using very thin thread for a large sculpture, which will take lots more time but I believe this will contribute towards creating the kind of Wow factor that I’m looking for.
Top Five Constraints
So far I have not encountered many constraints in this project. For example, money was not an issue as I purchased the supplies in India for a very cheap price. I have all of the supplies that I need, including the motor and Arduino parts and the 3d printer filament that I’ll need for the kinetic pieces.
The primary constraint will be time. Crocheting a large piece with intricate thread is very time-consuming. I learned this lesson when I decided to crochet my wedding dress, and I was still working on making it within hours of the ceremony. It’s very possible that I won’t finish all of the triangles by the completion of this course. Therefore, I plan to focus on the triangles comprising the body of the peacock first, and finishing the tail feathers later if needed.

There is a constraint with my skills in CAD design. I wish that I was more familiar with any software which could be used to digitally sketch this entire project in one file. I would like to know exactly how many of each colored triangle to make before I start building it, for example, and map out how long the tail feathers will be relative to the body of the peacock. It would be helpful to get a sense of how many tail feathers I should make. However, this level of CAD design is not possible with my current knowledge. What I have done so far is included below, which is a rough idea of how I might use triangle pieces to create the body of the peacock. The peacock model comes from https://www.thingiverse.com/thing:5027364.
Room to work will also be a big concern for this project. I tend to work best at home, and some of the process such as boiling the sugar water which will be used to harden the triangle pieces will need a stove and pot to achieve. However, my small apartment will be a difficult place to house such a large project.
The last constraint that I can identify at this time is courage. I’m feeling uncertain about making such a large piece, in large part because I have no idea what I will do after it is finished. I would love to sell it or display it somewhere, but I don’t know how to do that and may not have the courage to put my artwork out there in the world.
Next Steps
At this stage in the project development I have some clear next steps. First, I need to keep crocheting like crazy at all opportunities. After making some initial triangles to see the various color options, I have now chosen an exact color combination that I’m excited to work with. This should help me move along faster now.

Next, I plan to meet with ATLAS faculty members to get advice on how to create the motor and gear components as well as the mounting pieces for this project. I think it may need to be made out of wood in order to hold the entire large sculpture in place. And finally, I need to begin starching the triangle pieces that I do have so far, so that I can get a sense of how the stiffener affects the nature of the yarn I’m using, which is a combination of acrylic chenille yarn, thin acrylic yarn, and cotton thread.
2 Comments. Leave new
I can’t believe you created your own wedding dress using crochet! That’s incredible. I can provide some servo motors.
This looks really cool! I know nothing about crochet but my partner does it and I think it’s rad. I’d love to know how you’ve planned out the patterns (or is it all improvisation?) and I’m very excited to see the end result, wherever it’s at!
Also, I’m curious why you’ve chosen a light sensor. Do you have any concerns it will go off with changing daylight conditions or when the lights go on/off? I’ve worked with them before and the ones I used were kind of finicky. I have had much better results with ultrasonic sensors which can detect motion as far as 10-15 feet away, do not rely on ambient light, and seem to be more reliable on the whole.